Smarter Vehicle Dynamics Through Multi-Actuator Control
Latest News
Smarter Vehicle Dynamics Through Multi-Actuator Control
What if a vehicle’s true performance didn’t depend on a single system… but on how all of them talk to each other?
CATEGORY:
Technical
DATE:
November 21, 2025

The purpose of this analysis is to evaluate the path-tracking performance of a controller integrated with a VI-CarRealTime vehicle model. Several model-based control strategies have been implemented and compared: i) NMPC baseline, characterized by a 50:50 front–rear torque distribution; ii) NMPC with torque vectoring control (TVC); iii) NMPC with both TVC and rear-wheel steering (RWS). All the aforementioned formulations are based on a double-track vehicle model, whose mathematical equations are omitted here for brevity. The objective is to investigate the path-tracking benefits enabled by multi-actuator systems. In addition, a feedback + feedforward (FB+FF) steering control strategy – well established in the literature – combined with a PID speed controller is presented as a benchmark for comparison.
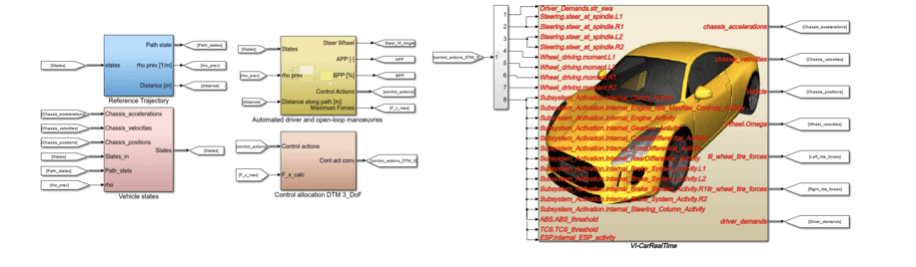
Figure1. Overview of the automated driving control framework.
Figure 2 shows the steering angle (left) and vehicle sideslip angle (right) versus lateral acceleration for the three control configurations during a 50 m-radius skidpad manoeuvre, starting from an initial speed of 60 km/h. The results refer to the NMPC baseline (blue), NMPC with TVC (dark red), and NMPC with TVC + RWS (green). The front and rear wheel steering angle, as well as the wheel torque at the corner levels, are interlay optimized by the controller, with in the context of autonomous driving, as the only target of achieving better tracking of the reference speed profile as well as minimizing the lateral error with respect to the reference trajectory.
The TVC increases the maximum lateral acceleration of approximately 8% compared to the baseline formulation. The introduction of the rear wheel steering, bring only a marginal improvement in the lateral acceleration peaks but significantly change the understeer and sideslip angle gradients, effective decoupling between yaw rate response and vehicle sideslip. Overall, the RWS system modifies the understeer and sideslip gradients, improving transient agility and directional response, while TVC primarily enhances the achievable lateral force envelope.
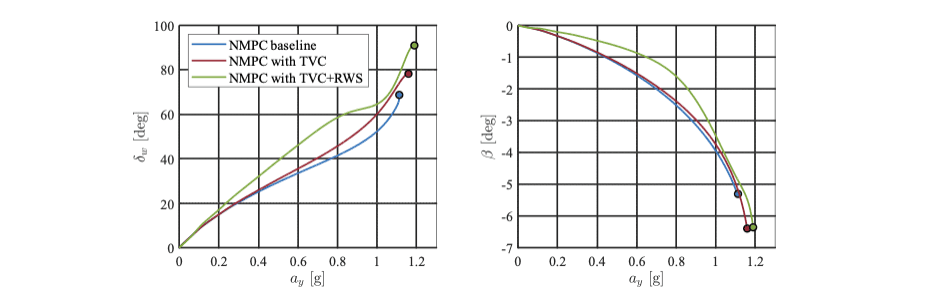
Figure2.Steering angle (left) and vehicle sideslip angle (right) versus lateral acceleration for the baseline configuration, NMPC with TVC, and NMPC with TVC + RWS during a 50m-skidpad manoeuvre starting from an initial speed of 60km/h.
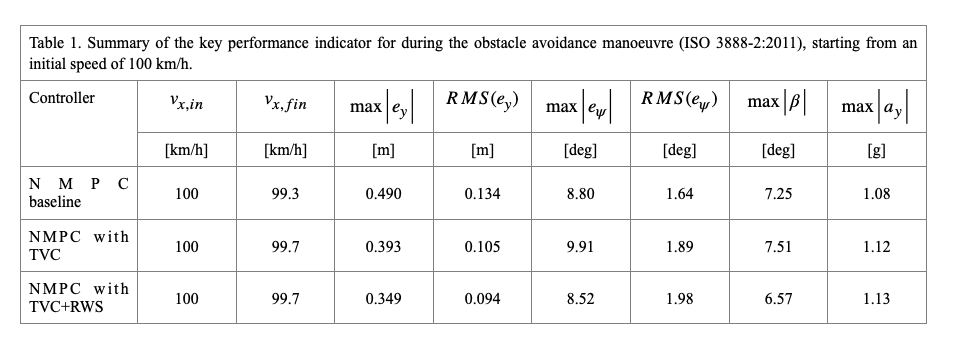
The controllers’ performance is further evaluated through an obstacle avoidance manoeuvre in compliance with ISO 3888-2:2011, starting from a deliberately high entry speed of 100 km/h to push the vehicle’s handling limits. The objective of this test is to follow the reference trajectory while maintaining a nearly constant speed, prioritizing lateral error minimization (high priority) and heading angle error minimization (lower priority). Figure 3 illustrates the vehicle trajectories, lateral error, and heading angle error for all controllers. The FB+FF controller fails to track the reference path due to a delayed steering response and insufficient preview time, leading to a significant deviation from the target trajectory.
The NMPC baseline successfully completes the manoeuvre, with a maximum lateral error of approximately 0.5 m. Introducing torque vectoring increases vehicle agility, resulting in an improved trajectory tracking accuracy and reduced lateral deviation.
The inclusion of RWS further modifies the sideslip and yaw rate dynamics, advancing their onset in the entry phase of the manoeuvre. This behaviour arises from the counter-phase action between front and rear steering angles, which momentarily destabilizes the vehicle to enhance agility. As a result, the RWS configuration enables the controller to achieve better trajectory tracking with reduced front steering demand and lower TVC intervention.
This indicates that the NMPC identifies the RWS as the most effective actuator for improving vehicle agility and tracking accuracy under highly transient conditions.
Table 1 summarizes the key performance indicators (KPIs) for the tracking scenario, highlighting the clear benefits of the RWS system in terms of reduced lateral and heading errors, improved stability, and maintained speed performance.
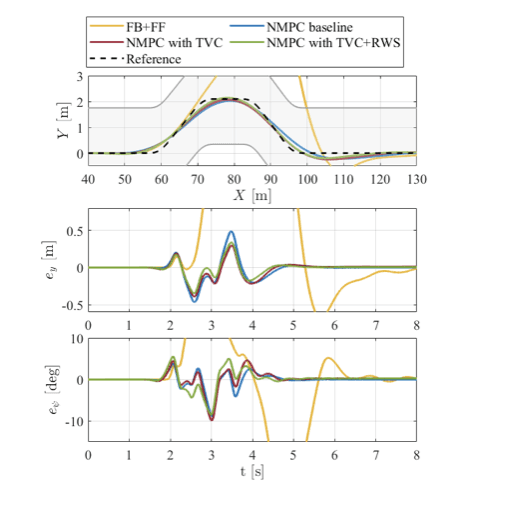
Figure 3. Comparison of the resulting vehicle trajectories, lateral errors, and heading angle errors during the obstacle avoidance manoeuvre (ISO 3888-2:2011), starting from an initial speed of 100 km/h.
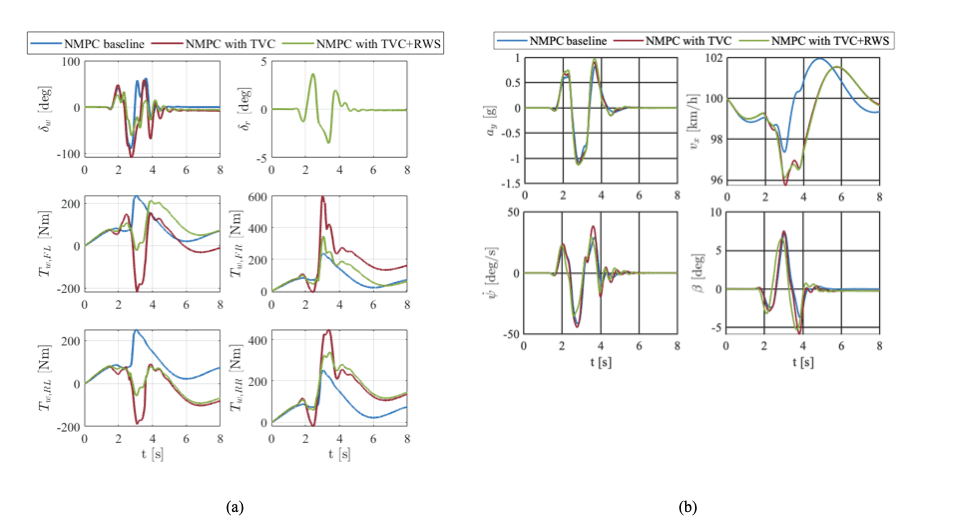
Figure 4. (a) Steering wheel angle, rear steering angle, and individual wheel torques; (b) summary of the main vehicle states, i.e., vehicle lateral acceleration, speed, yaw rate, and sideslip angle during the obstacle avoidance manoeuvre (ISO 3888-2:2011), starting from an initial speed of 100 km/h.
To further emphasize the agility benefits of the RWS system, a slalom-type obstacle avoidance test was performed, characterized by multiple closely spaced obstacles and an initial speed of 100 km/h. The main goal of the test is to minimize lateral deviation while maintaining constant speed.
The results in Figure 5 confirm the trends observed in the single obstacle avoidance test: during highly transient conditions, TVC becomes less effective, whereas RWS intervention dominates, reducing the required TVC effort and further improving path-tracking performance.
🔗 See our complete analysis here: https://lnkd.in/dsbushCi
Author: Pietro Stano | Vehicle Performance Engineer.